
Eurelectric Power Summit 2026

SMAGRINET
16
Liikmed
150
Kaasatud eksperdid
9000
Liikmesettevõtete töötajad
4265700000
Liikmesettevõtete käive (eurodes)
Pressiteated
- Toimus WEC Akadeemia diskussioon võrgu paindlikkusest, Hispaania ja Portugali juhtum
 28. aprillil 2025 toimunud ulatuslik elektrikatkestus Hispaanias ja Portugalis tõi teravalt esile küsimuse Euroopa omavahel ühendatud elektrisüsteemi vastupidavusest. Juhtum näitas, …
28. aprillil 2025 toimunud ulatuslik elektrikatkestus Hispaanias ja Portugalis tõi teravalt esile küsimuse Euroopa omavahel ühendatud elektrisüsteemi vastupidavusest. Juhtum näitas, … - Tegusad issid ja hakkajad emmed, leiutajate ralli kutsub osalema
 Leiutajate ralli võistlus kutsub taas kokku 4.–9. klassi noori, et nutikus, inseneriannete ja tiimitööoskus proovile panna. Levita infot või pane …
Leiutajate ralli võistlus kutsub taas kokku 4.–9. klassi noori, et nutikus, inseneriannete ja tiimitööoskus proovile panna. Levita infot või pane … - Muudatused elektriarvel alates 2026. aasta algusest
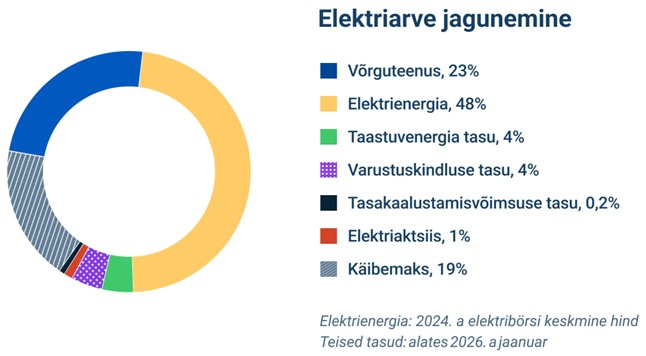 Alates 2026. aasta algusest lisandub elektriarvele kaks uut rida. Keskmisele kodutarbijale on nende kogumõju umbes kolm kuni neli eurot kuus. …
Alates 2026. aasta algusest lisandub elektriarvele kaks uut rida. Keskmisele kodutarbijale on nende kogumõju umbes kolm kuni neli eurot kuus. …
Viimased artiklid
- Geopoliitiliste pingete eskalatsioon on tekitanud uue reaalsuse, sõdade ajastu paneb proovile maailma energiaturud ja pingestab energiataristute toimimist
- Kuidas oma kodu talveks ette valmistada ja hoida kokku energiaarvetelt
- Energiavampiirid sinu kodus ehk millised kodumasinad tarbivad enim elektrit?
- Eesti elektrisüsteem liigub kodusele mänguväljakule
- Majanduse elektrifitseerimise ja konkurentsivõime huvides tuleb vähendada elektri maksukoormust
- Negatiivsed elektrihinnad – põhjused, mõjud ja võimalikud lahendused
- Positron – avastusretk tulevikku
- Eesti suurim jaotusvõrk pingutab, et võrgu töökindlus oleks üha parem
- Taastuvelektri arengu oluline tagatis on energia salvestamine
Liitu Eesti Elektritööstuse Liiduga

PÄDEVUS
Evime reaalset infot ja kompetentset sektoripõhist teavet
kogu elektritööstuse väärtusahela ulatuses ja omame juurdepääsu valdkondlikule ekspertide koostöövõrgustikule Euroopas ja mujal maailmas

KOOSTÖÖ
Arendame liikmete ja partneritega omavahelisi koostöösuheteid väärtusahelat läbivalt ning panustame sektori haridusse ja järelkasvu

MAINE
Oleme erialaliiduna organisatsioon, mis suudab tulemuslikult esindada liikmete huve energia- ja kliimaregulatsiooni kujundamisel Eestis ja Euroopa Liidus

EESTKÕNELEJA
Oleme elektritööstuse valdkonna ettevõtjate ja organisatsioonide ühiste huvide esindaja ja eestkõneleja Eestis ja Euroopas, tegutseme majanduse kui terviku konkurentsivõime eest